Bahasa indonesia
 |













| MODEL: | |
|---|---|
| Kuantitas: | |
XHY
DLL
SPESIFIKASI
DELI
ZHEKONEKTOR JIANG DELI CO.,LTD
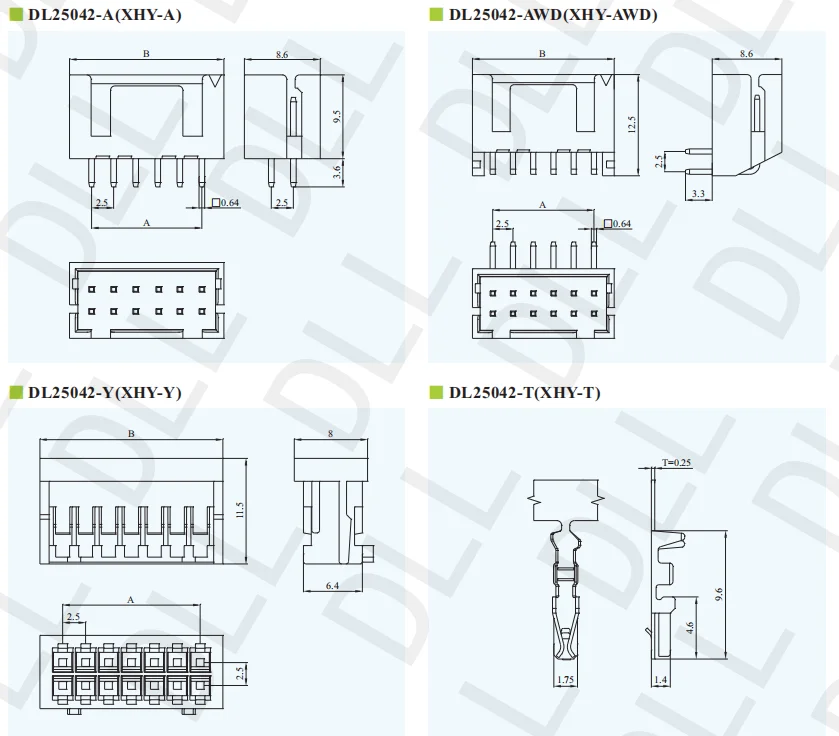
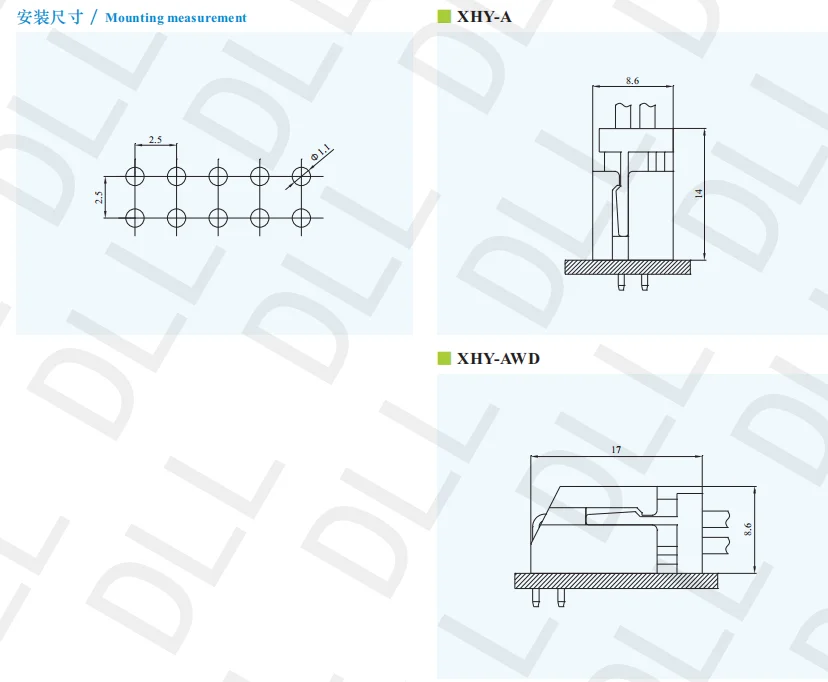
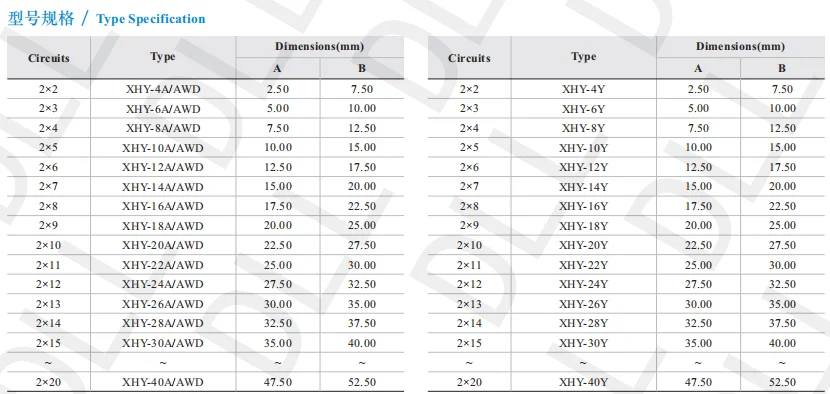
ganti konektor header pin xhy 2,5 mm; jam xhy konektor header pin 2,5 mm
Nilai Tegangan: | 250VAC,DC |
Nilai saat ini: | 3A AC,DC |
Resistensi kontak: | maks 30MΩ |
Resistansi Isolasi: | menit 1000MΩ |
Menahan Tegangan: | 650V AC/menit |
Suhu: | -25℃~+85℃ |
BAHAN
DELI
ZHEKONEKTOR JIANG DELI CO.,LTD
Perumahan: | (Nilon) UL94-V0(2) |
Terminal: | Perunggu Fosfor, Berlapis Timah |
Kue wafer: | (Nilon) UL94-V0(2) |
Lebih Banyak Produk Untuk Anda Pilih:

Aplikasi
Sistem kendali robot: Pada penggerak bersama, perolehan sinyal sensor, dan sistem kendali robot, konektor jarum lurus XHY dapat digunakan untuk menghubungkan komponen seperti motor, encoder, dan sensor gaya. Misalnya, motor dihubungkan ke pengontrol sambungan robot melalui konektor pin lurus untuk mencapai kontrol gerakan sambungan yang presisi; Encoder memberikan umpan balik informasi posisi dan kecepatan sambungan ke sistem kontrol melalui konektor jarum lurus, sehingga menghasilkan kontrol loop tertutup.
SPESIFIKASI
DELI
ZHEKONEKTOR JIANG DELI CO.,LTD
ganti konektor header pin xhy 2,5 mm; jam xhy konektor header pin 2,5 mm
Nilai Tegangan: | 250VAC,DC |
Nilai saat ini: | 3A AC,DC |
Resistensi kontak: | maks 30MΩ |
Resistansi Isolasi: | menit 1000MΩ |
Menahan Tegangan: | 650V AC/menit |
Suhu: | -25℃~+85℃ |
BAHAN
DELI
ZHEKONEKTOR JIANG DELI CO.,LTD
Perumahan: | (Nilon) UL94-V0(2) |
Terminal: | Perunggu Fosfor, Berlapis Timah |
Kue wafer: | (Nilon) UL94-V0(2) |
Lebih Banyak Produk Untuk Anda Pilih:
Aplikasi
Sistem kendali robot: Pada penggerak bersama, perolehan sinyal sensor, dan sistem kendali robot, konektor jarum lurus XHY dapat digunakan untuk menghubungkan komponen seperti motor, encoder, dan sensor gaya. Misalnya, motor dihubungkan ke pengontrol sambungan robot melalui konektor pin lurus untuk mencapai kontrol gerakan sambungan yang presisi; Encoder memberikan umpan balik informasi posisi dan kecepatan sambungan ke sistem kontrol melalui konektor jarum lurus, sehingga menghasilkan kontrol loop tertutup.